






���ڶ˵��˵��Ԅ��{�ϵ�y(t��ng)ֻ����demo�
�����W(xu��)����ϵ�F(tu��n)�(du��)��(chu��ng)�k��Wayve�{��C(j��)���W(xu��)��(x��)�㷨��ֻ��Ҫʹ�Ôz���^�ͻ������l(w��i)�nj�(d��o)���Ϳ��Ԍ�(sh��)�F(xi��n)�Ԅ��{���܇��İ���ĵ�·����
�ԏ�2016�꣬Ӣ���_(d��)���_�������Ԅ��{���܇�Ķ˵�����ȌW(xu��)��(x��)���g(sh��)֮���ѽ�(j��ng)�в�Ӌ(j��)�䔵(sh��)�Ĺ�˾����λ�����ۺ����ô˼��g(sh��)�����Ԅ��{��demo�����ξW(w��ng)�j(lu��)�Y(ji��)��(g��u)�����Ԍ�(sh��)�F(xi��n)�z���^ݔ�뵽�x܇���T����Pݔ����ֱ��ӳ�䡣Ȼ���@�N���T��Ҳע���������Խ�Q�Ć��}�����࣬���y��(y��ng)�����w�{�h(hu��n)���ϵď�(f��)�s�ԡ��Ќ��������J(r��n)��˵��˲��m���_�l(f��)��(sh��)���o���{�ϵ�y(t��ng)��������demo����Ҏ(gu��)ģ���ÿ��ܷdz����y��
�˵���ֻ����demo��Ʉ����W(xu��)�F(tu��n)�(du��)��(chu��ng)�k��Wayve�o���{�ܛ����˾�s���@ô�J(r��n)�顣�����]���ø߾��؈D��Ҳ�]���ü������_(d��)�Ȱ��F�Ă���������(d��ng)ȻҲ�]�нo��܇�ֹ�ݔ��Ҏ(gu��)�t��ֻӖ(x��n)��20С�r(sh��)��(sh��)��(j��)���Ϳ����ڏ�δ���^�ĵ�·���{

Wayve �аl(f��)�F(tu��n)�(du��)�J(r��n)���Ȼ���Ԅ��{�Ͳ���Ҫ�ֹ����aһЩҎ(gu��)����Ҫ��ֵ�չ�F(xi��n)�����ܵ����ԡ��F(tu��n)�(du��)�����ˮ�(d��ng)�´�����ȌW(xu��)��(x��)��(qi��ng)���W(xu��)��(x��)�㷨��������һ��(g��)���������һ�������W(xu��)��(x��)�{���Ԅ��{�ϵ�y(t��ng)��
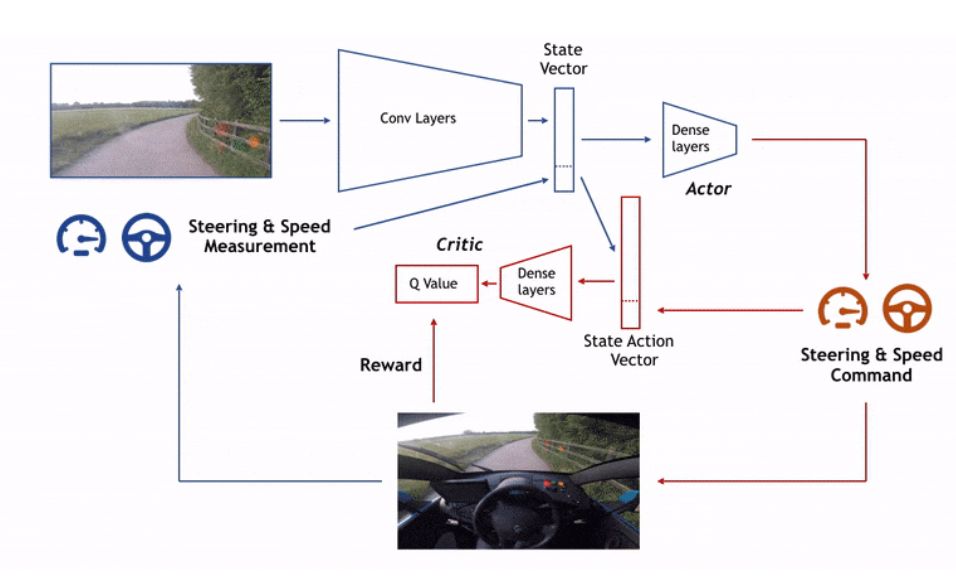
��(j��ng)�^̽������(y��u)�����u������(g��)���E�M(j��n)�е�����������ȴ_���Բ����ݶȣ�Deep deterministic policy gradients��DDPG��������Q܇�����ֆ��}��

�F(xi��n)�м��g(sh��)�ĈD�����wϵ�Y(ji��)��(g��u)���Д�(sh��)���f��(g��)����(sh��)����Wayve�F(tu��n)�(du��)�ľW(w��ng)�j(lu��)��(g��u)����һ��(g��)��ȾW(w��ng)�j(lu��)����4��(g��)���e�Ӻ�3��(g��)��ȫ�B�ӌӣ�����ֻ�в���1�f��(g��)����(sh��)������̎��������܇GPU�ψ�(zh��)�С�
�ڏ�(qi��ng)���W(xu��)��(x��)����yԇ�У�ͨ�^�S�C(j��)��������܇�����Լ���·�y����܇����(bi��o)ӛ��Ȼ�����(j��)�ռ��Ĕ�(sh��)��(j��)��(y��u)�����ԣ��ٲ����؏�(f��)��
�Y(ji��)���ˈD���g���О��¡�Ķ˵������R�^���
�����(sh��)���{܇��˾ʹ��ģ�M���(y��n)�C������ϵ�y(t��ng)����Wayve�Ԅ��{���܇�ڷ����ЏV���W(xu��)��(x��)���̎����Ҋ��߅����r��WayveӖ(x��n)����܇�M(j��n)��ģ�M�{�����W(xu��)����֪�R�D(zhu��n)�����F(xi��n)��(sh��)���硣
Wayve�]�Ќ�ģ�M�ͬF(xi��n)��(sh��)����ҕ��ɂ�(g��)��ͬ���I(l��ng)�����O(sh��)Ӌ(j��)��һ��(g��)��ܣ������߽Y(ji��)���������ȿ�����ģ�M��Ӗ(x��n)���D(zhu��n)��Q�ߣ��ֿ����ڬF(xi��n)��(sh��)������չ�F(xi��n)����Ƶ��О���o���M(j��n)����������ʾ��

Wayve��ģ����һ��������ڈD���D(zhu��n)�Q�ľ��e׃���ԄӾ��a��ʽ�ľW(w��ng)�j(lu��)�M�ɣ����ڈD���g�����o�O(ji��n)���D�D��ķ��g�W(w��ng)�j(lu��)��Unsupervised Image��to��Image Translation Networks�� UNIT�������ڃɂ�(g��)��֮�g�]���κ���֪�Č��R��?q��)��?y��ng)�P(gu��n)ϵ����r�£�ģ���܉�������֮�g�M(j��n)���D(zhu��n)�Q���D��һ��(g��)��������Ҫ���ֵ����ӡ�ֵ��ע����ǣ�ģ�M����ҕ�X������ڌW(xu��)��(x��)�{�r(sh��)����������Ҫ�ģ�������ģ�M�������ͨһ�ӣ����f���Ժܺõ���ɷ���ģ�M��Wayve�о��Q����(n��i)�ݱ���ȱ�ҕ�X����ȸ���Ҫ�����ǣ���Ч��ģ�M������ͨ���c�ߵ��О���Ȼ��һ��(g��)�������(zh��n)��

�����挍(sh��)������{(sh��)��(j��)�;����O(sh��)Ӌ(j��)��߅��������ģ�M����
��܇�ɻ���ģ�͵���ӏ�(qi��ng)���W(xu��)��(x��)ϵ�y(t��ng)�(q��)�ӣ�ԓ�㷨���x���ռ����挍(sh��)��(sh��)��(j��)�ЌW(xu��)��(x��)�A(y��)�yģ�͡��@ģ�͌W(xu��)��(x��)��ʹ���A(y��)�yģ���������������(sh��)��(j��)��Ӗ(x��n)���{

Wayve�������_�l(f��)���S��������(qi��ng)��ĕr(sh��)�B(t��i)�A(y��)�yģ�ͣ��������@�ǘ�(g��u)�����ܰ�ȫ�Ԅ��{���܇���P(gu��n)�I��

Ŀǰ��ԓϵ�y(t��ng)�ѽ�(j��ng)������ JaguarI��PACE ܇�ϡ��@�v܇�A����2019��ȚW�����܇�͵ķQ̖��δ�팢������(g��)Ӣ���͚W����ռ���(sh��)��(j��)����(d��ng)�£���(sh��)��(j��)��u�e�ۣ����(q��)���㷨�����_(d��)������{�T�|(zh��)����95�����܉�̎����ͨ�����h(hu��n)�ν���·�ڣ�ʮ��·�ڵȡ�
�M�����˕��X�ö˵��˵��Ԅ��{�ϵ�y(t��ng)���Ȳ���Ҳ���`��l(f��)�����}�y�Խ�ጣ�Ȼ��Wayve�����䏊(qi��ng)����㷨�C���@�N��ȌW(xu��)��(x��)�ļ��g(sh��)��ֻ������demo��δ��Ҳ���Ա��C��ȫ��Ҳ�������á�
 ����
����
�l(f��)���uՓ
���
�֙C(j��)
�(y��n)�C�a
������䛼����L������OFweek����(w��)
߀���Ǖ��T�����M(f��i)ע��
��ӛ�ܴaՈݔ���uՓ��(n��i)��...
Ոݔ���uՓ/�uՓ�L��6~500��(g��)��

�DƬ��
�әC(j��)����ʲô�|���������")
��62��")
Ʒ��(sh��)�\���c��܇��������")
�����Ԅ��{��܇(li��n)�W(w��ng)")
������")

�����Y(ji��)����")
��Waymo����������")
���»������
-
���ʻ�������鿴>> �������h�������ք�(chu��ng)�¼��g(sh��)���������
-
���ʻ�������鿴>> ���ھ�ֱ������ҕ��������VisionSym �x����܇��W(xu��)ԭ���_�l(f��)
-
���ʻ�������鿴>> 12��16-17�� AMD Ƕ��ʽ���
-
���ʻ�������鿴>> �����ք�(chu��ng)�¼��g(sh��)���
-
���ʻ�������鿴>> �����̎�ϵ�С���܇��Ӽ��g(sh��)�ھ����
-
���ʻ�������鿴>> Works With �_�l(f��)�ߴ������վ
���]���}

- 1 2148�f������ͻ�������߽M��ȭ����˄ӳ���O(sh��)ʩ���걶����
- 2 ���ǡ��ց��ˣ�FSD�Ї����Ͼ�ǰҹ��С���A���lԓʧ�ߣ�
- 3 2026�꣬��܇����Ԅ��{������ʲô�A�Σ�һ����
- 4 2026�꣬��܇����Ԅ��{������ʲô�A�Σ�������
- 5 ��˹��CEO�R˹���ַź�Ԓ��2026��o��܇�_��ȫ����ʮ����Լ��_܇�ɡ�С���ۺá�
- 6 25�f��5�������ŞSUV�Ŀ�ֵ�õ�
- 7 �����Ԅ��{�p���衱���Ї�����������ħ��������ـ����܇��(zh��n)���l���A��δ����
- 8 �۰�+58ͬ��(li��n)��Ѻע����ȫ����L4�Ԅ��{��һ�ɡ��S�ݿƼ������йɣ���ռ��90.5%���[�ι�܊���{ʲô��Խʮ�����ڣ�
- 9 ��ҫ����܇���ܻ���څ�ݣ��Ć��c(di��n)ͻ�Ƶ��wϵ�Q�� | �����Z
- 10 ����AI�˳��µ���܇�a(ch��n)�I(y��)���ġ���Ҋ���硱�����������硱

- ��ܛ�����̎� �V�|ʡ/������
- �Ԅӻ������̎� �V�|ʡ/������
- �������аl(f��)���̎� ����ʡ/������
- �N�ۿ��O(ji��n)���������� ������/����^(q��)
- ���������N�۽�(j��ng)�� �Ϻ���/��څ^(q��)
- �������������̎� ������/����^(q��)
- �����аl(f��)���̎� ������/��ƽ�^(q��)
- ���g(sh��)���� �V�|ʡ/���T��
- ���b���̎� ������/����^(q��)
- �Y(ji��)��(g��u)���̎� �V�|ʡ/������

